
Mark Stone/Universidad de Washington
Científicos de la Universidad de Washington han construido un robot volador sin batería que estabiliza su descenso cambiando de forma en el aire: un diseño inspirado en el origami, según un estudio. artículo reciente publicado en la revista Science Robotics. Estos microvoladores pesan solo 400 miligramos y, si hay una brisa ligera y agradable, pueden viajar a lo largo de un campo de fútbol cuando los deja caer un dron desde una altitud de 40 metros (131 pies).
La robótica en miniatura es un área de investigación muy activa. Por ejemplo, a principios de este año informamos cómo los ingenieros construyó un robot blando en formato de minifigura de Lego. El robot cambia de forma «fundiéndose» en forma líquida en respuesta a un campo magnético, rezumando entre los barrotes de su jaula antes de solidificarse nuevamente en el otro lado, tal como el T-1000 en Terminator 2: El día del juicio final. Este robot pertenece a una clase conocida como máquinas en miniatura impulsadas magnéticamente, típicamente hechas de polímeros blandos (como elastómeros o hidrogeles) incrustados con partículas ferromagnéticas que tienen perfiles de magnetización programados. Este tipo de robots pueden nadar, trepar, rodar, caminar y saltar, además de cambiar de forma simplemente cambiando el campo magnético correspondiente.
En cuanto a los robots voladores, en 2017 informamos sobre científicos holandeses que construyó un robot volador capaz de realizar las impresionantes hazañas aerodinámicas de los insectos voladores como las abejas, las libélulas y las moscas de la fruta, especialmente cuando estos insectos buscan escapar de los depredadores o del movimiento de una mano humana. Aunque el robot era mucho más grande que un insecto promedio, podía flotar y volar en cualquier dirección (arriba, abajo, adelante, atrás y de lado), así como realizar giros inclinados y giros de 360 grados, similares a bucles o barriles. . rollos. También contaba con una excelente eficiencia energética, capaz de flotar durante cinco minutos o volar más de un kilómetro con una sola carga.
Mark Stone/Universidad de Washington
Esta última empresa combina capacidades de vuelo y cambio de forma en un pequeño microvolador. El equipo de la Universidad de Washington estaba particularmente interesado en construir un microvolador sin baterías que pudiera ser dispersado en lotes por drones, cayendo al suelo y esparciéndose de manera similar para plantar semillas y hojas. «Esta capacidad de dispersarse con el viento sin propulsión activa es útil para diseñar microaviones dispersos por el viento», escribieron los autores, señalando que dichos dispositivos serían más pequeños y livianos que los drones. «Equipados con sensores, estos microvoladores podrían automatizar el despliegue de redes de sensores inalámbricos a gran escala para el monitoreo ambiental».
Sin embargo, lograr la actuación y el control en tales microvoladores generalmente requiere la incorporación de un mecanismo de actuación a bordo, detección a bordo y/o capacidades computacionales para el control, todo lo cual puede agregar un peso considerable al robot resultante, según los autores. Por ejemplo, ha habido diseños anteriores para este tipo de robots que presentan planeadores de ala fija para controlar el descenso, así como diseños inspirados por plantas con semillas giratorias. Las desventajas eran los motores grandes que consumían mucha energía y requerían baterías pesadas, lo que daba como resultado robots más grandes y pesados.
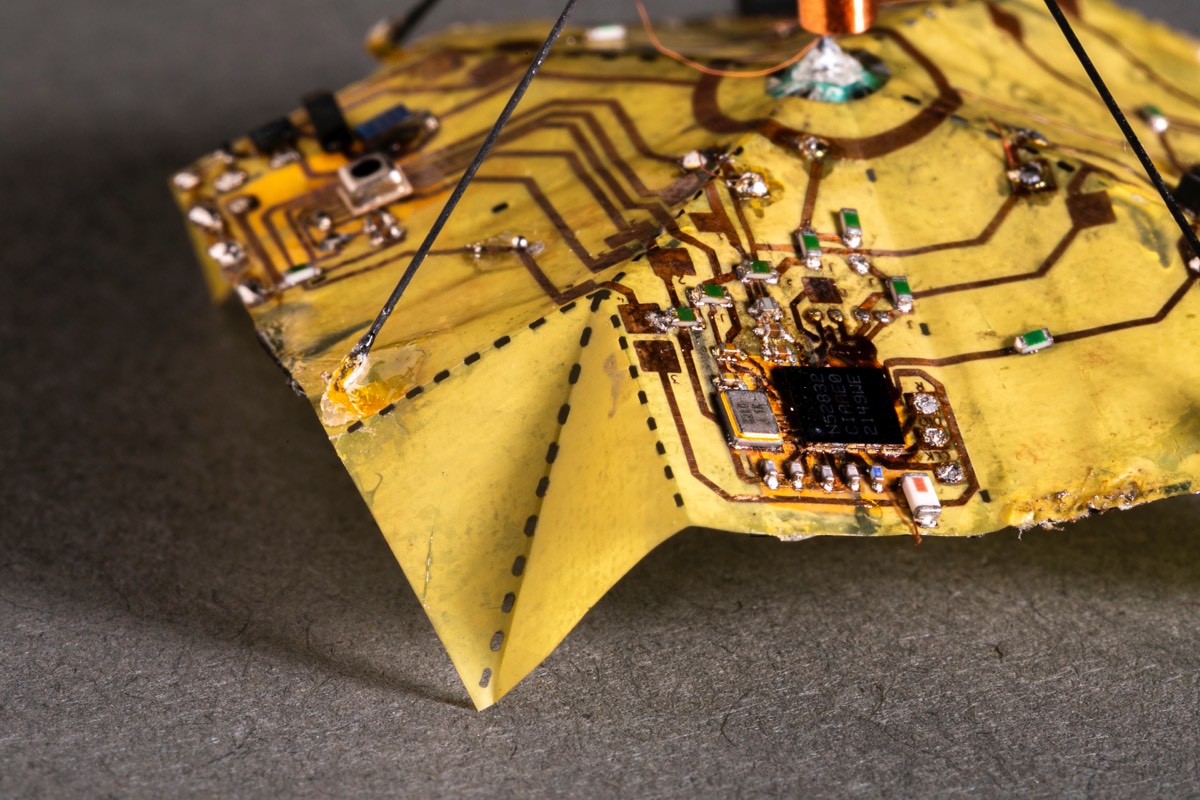
Los microfliers UW están diseñados para llevar pequeños sensores integrados para monitorear la temperatura, la humedad y otras condiciones ambientales. Cuentan con actuadores sin baterías alimentados por energía solar, un circuito que recolecta la energía solar necesaria y un controlador para desencadenar el cambio de forma. El equipo utilizó un Pliegue de origami miura-ori que ocurre en las hojas. «El patrón Miura-ori es una forma de origami rígido, lo que significa que las caras de la estructura no se contorsionan durante el plegado y las deformaciones ocurren sólo a lo largo de líneas de pliegue definidas», escribieron los autores. Esto ahorra energía y la falta de deformación en las caras de la estructura facilita la fijación de componentes electrónicos y células solares a estas caras.






{kind=link}